In general, it is possible to distinguish between both over- and under-detection of the Observed Flood extent (i.e. false alarms and missed alarms, respectively), as outlined below.
False alarms unnecessarily draw the attention of users and thus could create frustration and mistrust in the product. The following “water look-alike” surfaces can yield false alarms:
Very dry or sandy soils.
Frozen ground.
Wet snow.
Flat impervious areas (e.g. smooth tarmac-covered airfields or roads).
Certain growing conditions and agricultural practices over cropland. These surfaces and artifacts usually feature very low backscatter signatures and thus appear as water in SAR imagery, rendering the water and flood mapping a difficult task. Another common effect in SAR remote sensing is radar shadowing, which appear over strong terrain (especially at the far-range section of the SAR image) as well as in the vicinity of high objects above the ground, like high buildings and along forest borders.
Missed alarms on the other hand would lead to situations where a flood event is not detected and leaves the users without notice, possibly losing time for reaction measures. Floods occurring in urban areas, densely vegetated areas, or under weather conditions featuring strong winds or heavy rainfall can lead to missed alarms. In particular, wind and heavy rainfall are hard-to-spot dynamic process as they roughen water surfaces and hence undermine the initial assumption of low backscatter due to specular reflection on smooth water surfaces.
¶ 4.3 How to address false and missed alarms with the GFM product
A variety of methods can be used to address the abovementioned issues of SAR-based water mapping which potentially cannot be directly solved by the proposed flood detection algorithms using only NRT-available backscatter information and hence indication need on pixel level for potential misclassification due to reduced sensitivity.
These challenges are classified into Static effects (related to ground surface, land cover or topography), and Dynamic effects (due to meteorological dynamics). Note that, with respect to the GFM reprocessing cycle, static layers are unchanged during NRT processing but may be updated during reprocessing after evolution activities.
Both the Exclusion Mask and Advisory Flags are delivered with the other GFM output layers and aim at improving the reliability, usefulness and user acceptance of the GFM product. The masking and flagging of dynamic and static effects is implemented as follows:
Static effects
These are bound to ground surface characteristics such as land cover (e.g. flat impervious areas, urban areas, densely vegetated areas), and shadowing (radar shadowing).
These effects are addressed by the Exclusion Mask. Pixels that cannot be classified by the SAR sensor into flooded, permanent / seasonal water, and non-water areas, are highlighted in this output layer as no-data pixels.
The Exclusion Mask indicates all pixels that cannot be classified by the input Sentinel-1 data, considering statistical parameters from the data cube as well as auxiliary datasets. The pixels addressed by Exclusion Mask thus can be directly discarded as no-data, leaving the interpretation of the produced flood extent and (adjacent) no-data-gaps to the users, who are generally familiar with their area-of-interest.
Dynamic effects
These are triggered by weather conditions – i.e. meteorological features (strong wind, heavy rainfall), meteorological-induced state of the soil (soil dryness, frozen ground, or wet snow).
They are flagged by the dynamic Advisory Flags. The Advisory Flags indicate locations where the SAR data might be disturbed by such processes during the acquisition but leaves the flood and water extent layers unmasked.
The GFM output layer Advisory Flags highlights where meteorological processes such as wind or frozen conditions may impair flood and water detection. As the Advisory Flags can only be retrieved at a coarser resolution, the information is not fed into the Exclusion Mask. As a separate output layer, it serves to guide users when interpreting the product, allowing additional insight on its local reliability at the time of Sentinel-1 acquisition.
To assure a globally consistent land-sea border for all GFM flood and water output layers, the CopDEM Water Body Mask (WBM) is integrated into the observed water extent and all pixels are set to “water” where the WBM indicates “sea”. While this static land-sea border provides consistency, it does not take into account daily coastline dynamics caused by tides. It may, therefore, occur in rare cases that the land-sea border shows a low-tide case whereas the Sentinel-1 flood mask covers a high-tide. In such a scenario flood pixels may falsely be identified on near-shore sandbanks that are actually inundated during high-tide.
Linear gaps between Sentinel acquisitions:
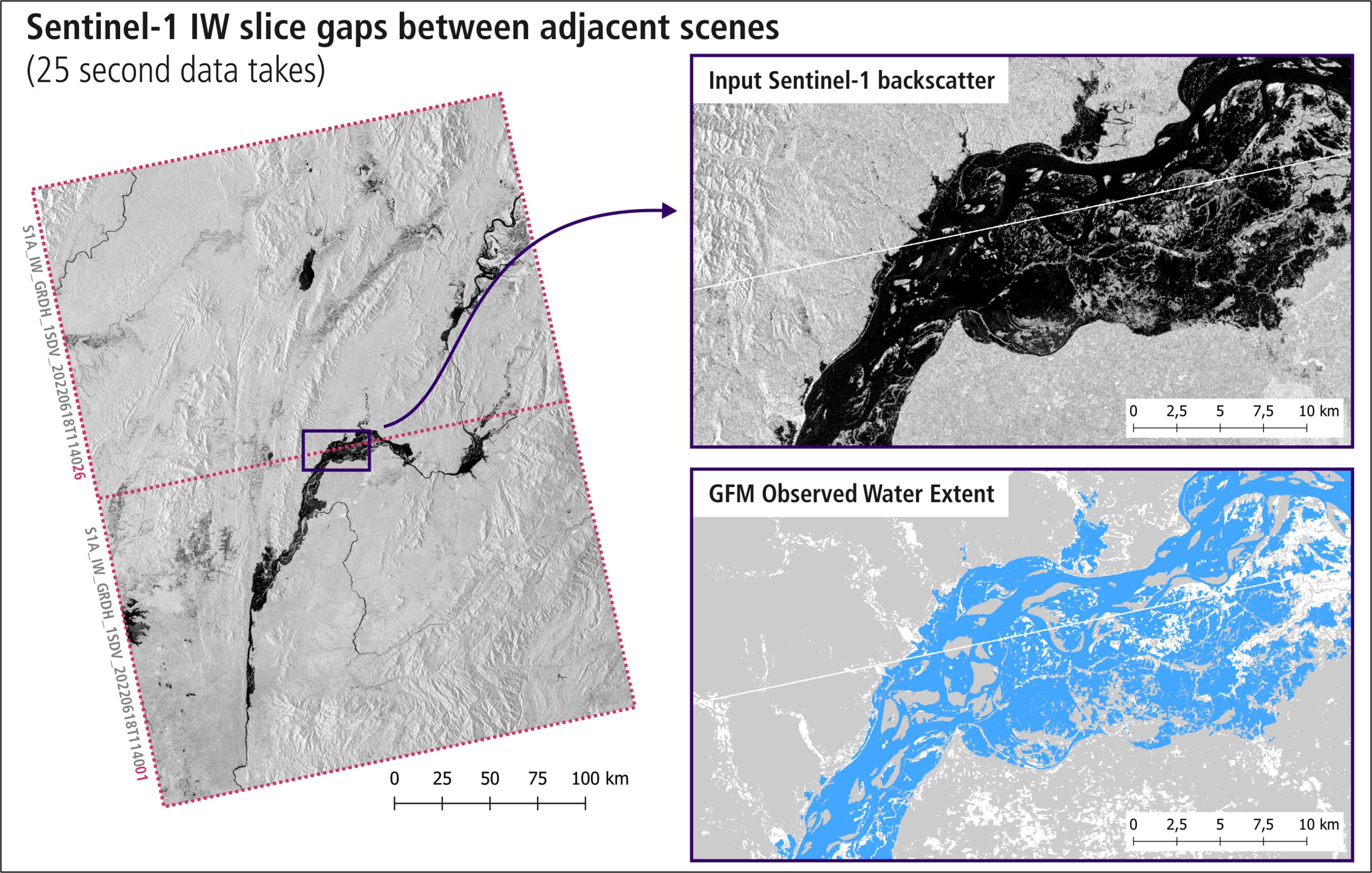
Sentinel-1 IW C-band SAR products are the main input to the GFM product. After raw satellite data downlink, ESA as the original data provider, slices the data per 25 seconds sensing time (equivalent to about 170 km in track direction) without leaving any overlap / data duplication.
During the SAR geocoding step, computing the correct backscatter values along the slice edges requires the adjacent measurements. If not available, it generates no-data values, locally. As the GFM service ingest the SAR datasets separately in near-real-time (NRT), neighbouring slices are not available, and narrow stripes of no-data are generated at a dataset’s start- and end rows, yielding thin linear gaps. Waiting to have all adjacent files mutually available would decrease the timeliness of the pre-processing, and is not done within the GFM service.
As a consequence, GFM layers remain unclassified over the location of the Sentinel-1 no-data pixels, leaving thin linear gaps. Figure 12illustrates the issue for a flood event in Myanmar in June 2022.
Figure 12: Example of linear gaps between Sentinel-1 acquisitions in GFM product results.
Didn't find what you were looking for? Send us a message through the contact forms: